Hvordan Flyability ELIOS 3 navigerer presist i helt mørke, GPS-frie interiører. SLAM (Simultaneous Localization and Mapping) gjør det mulig for dronen å operere sikkert inne i tanker, kjeler og skorsteiner – uten noe satellittsignal.
Enhver standard utendørsdrone (DJI, Autel etc.) bruker GPS/GNSS for posisjonsbestemmelse. Dette fungerer pålitelig i fri luft – men hva med inne i industrianlegg?
Inne i en tank, kjel eller skorstein finnes det ikke noe GPS-signal.
Ingen GPS betyr: dronen vet ikke hvor den er. Den kan ikke holde posisjon, kan ikke opprettholde stabil svev og kan ikke navigere autonomt. Å sende en GPS-avhengig drone inn i et trangt rom er rett og slett ikke et alternativ.
Dette er nettopp problemet Flyability ELIOS 3 ble designet for å løse. Den bruker SLAM (Simultaneous Localization and Mapping) – en navigasjonsmetode som fungerer helt uten GPS. Dronen kartlegger omgivelsene i sanntid og bestemmer sin posisjon ut fra rommets geometri.

SLAM er en algoritme som løser to oppgaver samtidig:
Den spesielle utfordringen: begge oppgavene avhenger av hverandre. For å vite hvor du er, trenger du et kart. For å bygge et kart, må du vite hvor du er. SLAM løser dette høna-og-egget-problemet iterativt i sanntid.
Forenklet:
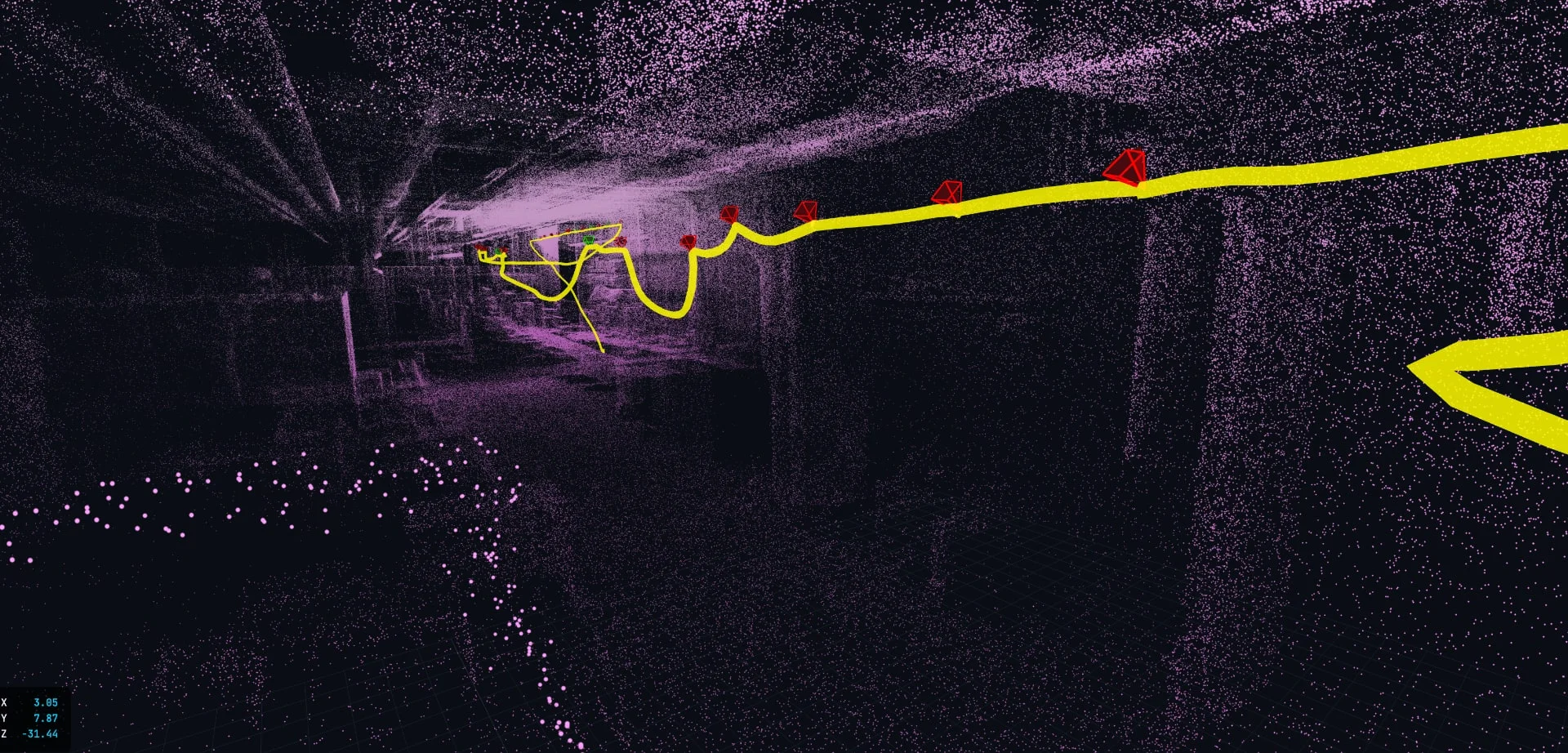
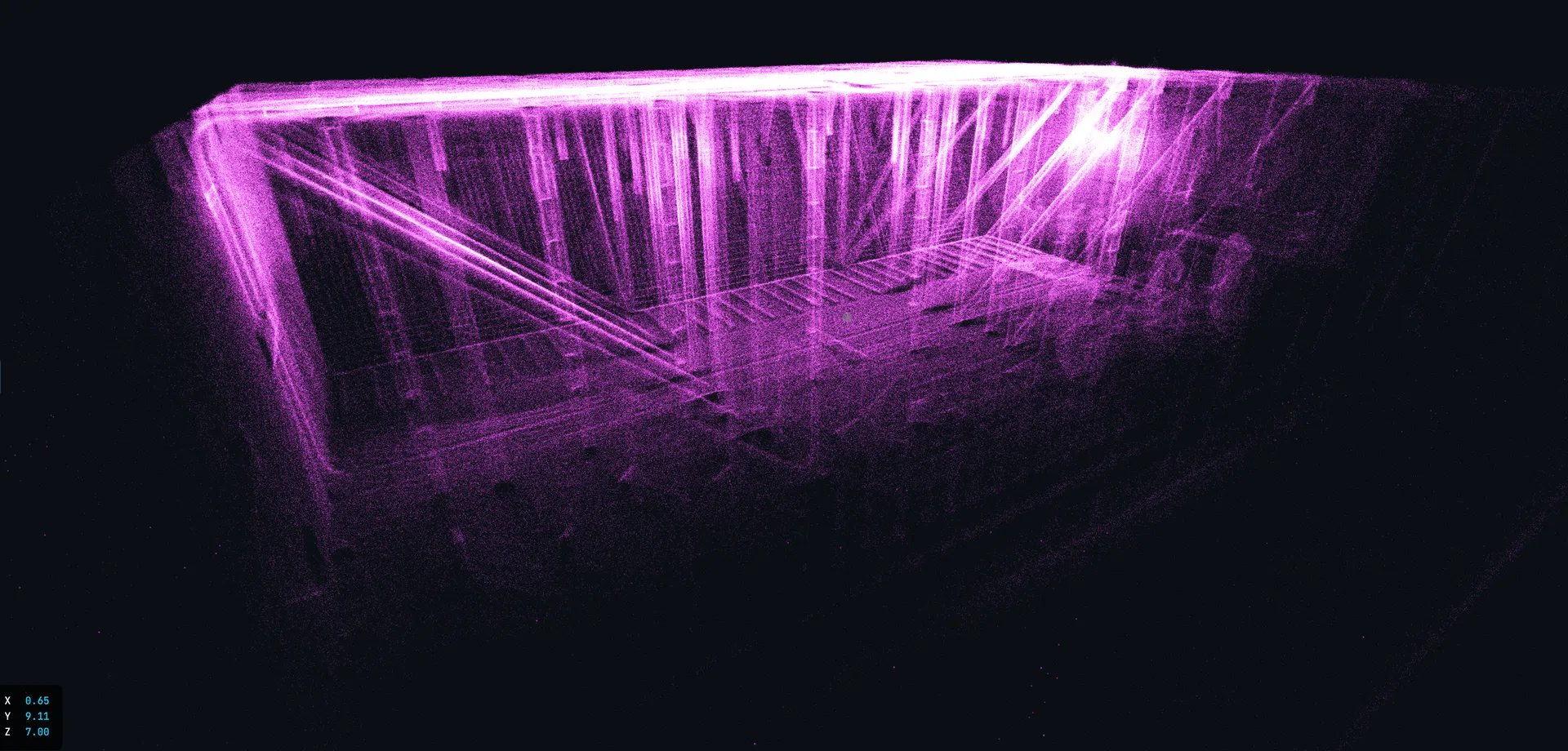
Dronen sender ut millioner av laserpunkter i alle retninger fra sin LiDAR-sensor. Disse punktene skaper et 3D-kart av omgivelsene. Samtidig sammenligner dronen det den nå ser med det den allerede har sett – og utleder sin nåværende posisjon fra denne sammenligningen.
I praksis: ELIOS 3 oppretter et sanntids 3D-kart (live-kart) på pilotkontrolleren under flyvningen. Piloten kan til enhver tid se hvor dronen er og hvilke områder som allerede er dekket.
SLAM finnes i ulike varianter – ikke alle er egnet for industrielle miljøer. FlyAware™ Engine fra Flyability er spesielt optimalisert for kravene til trange rom (Confined Spaces):
Bruker Ouster OS0-128 LiDAR-sensoren i stedet for kameraer. Fungerer uavhengig av lys og overflatetekstur – også i helt mørke rom.
FlyAware kombinerer LiDAR, IMU (treghetmåleenhet) og maskinsyn på en NVIDIA-prosessor. De ulike sensorene kompenserer for hverandres svakheter.
3D-kartet beregnes ikke etter flyvningen, men i sanntid. Piloten ser umiddelbart hvor dronen er og hvilke områder som er dekket.
ELIOS 3 kolliderer jevnlig med vegger og innredning – og fortsetter å fly. FlyAware Engine opprettholder orienteringen også etter kollisjoner.
Under lange flyvninger i store strukturer kan SLAM drifte minimalt. FlyAware minimerer denne driften gjennom kontinuerlig sammenligning med allerede kartlagte områder.
ELIOS 3-piloten har tre informasjonskilder på kontrolleren:
Standard kamerabildet i sanntid – som med enhver FPV-drone. 16 000 lumen LED-belysningen gjør også helt mørke rom synlige.
Den viktigste innovasjonen: et tredimensjonalt kart som vokser i sanntid. Piloten ser 3D-geometrien, droneposisjonen og allerede dekkede vs. ennå ikke fangede områder.
Flyvetid, batterinivå, avstand til inngangspunkt og sensorstatus – all kritisk informasjon på ett blikk.
En av de viktigste funksjonene som SLAM muliggjør: Smart Return-to-Home.
Problemet: Når batteriet går mot slutten inne i et kronglet trangt rom, må dronen finne veien tilbake til mannhullet – gjennom trange passasjer, rundt innredning, gjennom flere nivåer.
Løsningen: Siden ELIOS 3 har opprettet et komplett 3D-kart av rommet via SLAM, kjenner den veien tilbake. Smart Return-to-Home navigerer dronen automatisk langs den fløyde ruten tilbake til inngangspunktet.
Siden 2025/2026: Denne funksjonen er betydelig forbedret. Dronen optimaliserer returuten og unngår hindringer som ble oppdaget etter utflyvningen.
Hvorfor dette er viktig: Et dronetap inne i et trangt rom er ikke bare kostbart (maskinvare), det kan forsinke hele inspeksjonsoperasjonen – særlig hvis dronen sitter fast på et sted som er vanskelig tilgjengelig. Smart Return-to-Home minimerer denne risikoen.
GPS/GNSS
Standard for utendørsdroner. Nøyaktighet: 1–5 m. Innendørs: ikke tilgjengelig.
Visuell SLAM (kamerabasert)
Bruker kamerabilder for å gjenkjenne funksjoner i miljøet og utlede posisjon. Problem: fungerer bare med tilstrekkelig lys og teksturerte overflater – blanke metallvegger, mørke eller støv setter systemet ut av spill. Ikke egnet for industrielle trange rom.
LiDAR-SLAM (ELIOS 3 / FlyAware)
Bruker laserpunkter i stedet for kamerabilder. Fungerer lysuavhengig og teksturuavhengig. Kartleggingspresisjon for Ouster OS0-128: ±3 cm. Ideell for mørke, støvete, strukturfattige industrimiljøer.
Ultralyd/ToF-sensorer
Enkel avstandsmåling (hindringsdeteksjon). Ingen komplett 3D-kartlegging. Kun brukbar som supplement, ikke som primært navigasjonssystem.
Kaabelbasert (tether)
ELIOS 3 har tilbudt en valgfri kabeløsning siden 2025: en fysisk forbindelse til dronen for ubegrenset flyvetid og dataoverføring. SLAM forblir det primære navigasjonssystemet – kabelen supplerer med strømforsyning.
| Kriterium | GPS/GNSS | Visuell SLAM | LiDAR-SLAM (ELIOS 3) | Ultralyd/ToF |
|---|---|---|---|---|
| Innendørsbruk | ✗ | ⚠ Begrenset | ✓ | ⚠ Kun hindringsdeteksjon |
| Mørke | ✓ | ✗ | ✓ | ✓ |
| Teksturløse overflater | ✓ | ✗ | ✓ | ✓ |
| 3D-kartlegging | ✗ | ⚠ Begrenset | ✓ (1,31M pkt/s) | ✗ |
| Presisjon / kartlegging | 1–5 m | Variabel, upålitelig i industrimiljøer | ±3 cm (LiDAR-kartlegging) | cm–dm avhengig av sensor |
| Støv/damptoleranse | ✓ | ✗ | ⚠ Redusert | ✓ |
| Egnet for trange rom | ✗ | ✗ | ✓ | ✗ |
SLAM er imponerende – men ikke perfekt. Disse begrensningene er verdt å kjenne til:
I ekstremt store rom (f.eks. naturlige trekkkjøletårn > 100 m) kan SLAM-algoritmen drifte minimalt. Navigasjonen forblir stabil, men punktskyen blir litt mindre nøyaktig i ytterkantene.
SLAM trenger geometriske funksjoner. I helt runde, glatte tanker uten noen struktur har algoritmen færre ankerpunkter – i praksis sjelden et problem takket være sveisesømmer og innredning.
Tett støv eller damp kan spre LiDAR-stråler. ELIOS 3 brukes i rengjørte/gassfrie trange rom – reststøv er ikke et problem, men aktiv damputslipp er det.
ELIOS 3 er spesifisert for maksimalt 50°C omgivelsestemperatur. Bruk i aktivt fyrt anlegg er ikke mulig.
Vårt pilotteam har fløyet ELIOS 3 i trange rom siden 2017 – i tanker, kjeler, skorsteiner, siloer og komplekse industrikonstruksjoner.
 Christian EngelkeGrunnlegger og Dronepilot
Christian EngelkeGrunnlegger og Dronepilot Karsten LehrkeGrunnlegger Adm. Direktør
Karsten LehrkeGrunnlegger Adm. Direktør PhilippDronepilot
PhilippDronepilot MaxOppdragsplanlegging & Logistikk
MaxOppdragsplanlegging & Logistikk BenjaminDronepilot
BenjaminDronepilotJa – i rolige forhold er dette mulig. Vi flyr ELIOS 3 også utendørs, f.eks. på yttervegger eller rørbroer, opptil ca. 10–15 m høyde. Den begrensende faktoren er ikke SLAM (dronen finner tilstrekkelige geometriske referanser utendørs), men vind: beskyttelsesburet til ELIOS 3 gir ingen aerodynamisk stabilitet under vindbelastning. Når vind er involvert, er dronen ikke sikkert brukbar utendørs. For vindeksponerte utvendige inspeksjoner bruker vi derfor andre dronetyper.
Ouster OS0-128 LiDAR-en i ELIOS 3 oppnår en kartleggingspresisjon på ±3 cm. Dette betyr: 3D-punktskyene og målingene fra skanningen er svært presise og direkte brukbare for skadevurdering og vedlikeholdsplanlegging. Navigasjonsposisjonsholding er designet for sikker flyving og systematisk dekning i trange rom.
Ja. Å fly ELIOS 3 i trange rom krever erfaring og trening – både i håndtering av beskyttelsesburet (kollisjonshåndtering) og i tolkning av live-kartet. Vårt pilotteam har årelang erfaring og har gjennomført en rekke oppdrag i trange rom.
ELIOS 3 er manuelt styrbar. Selv ved et SLAM-svikt kan piloten trygt fly dronen tilbake til inngangspunktet ved hjelp av kamerabildet og styrespakene. Beskyttelsesburet forhindrer skade ved kontakt med vegger og innredning.
Nei. LiDAR fungerer ikke under vann (laserspredning). For undervannsinspeksjoner bruker vi ROV-systemer med andre navigasjonsmetoder (sonar, visuell referering). ELIOS 3 er utelukkende designet for luftoperasjoner.
Vi forklarer gjerne hvordan dronen navigerer i ditt spesifikke brukstilfelle. Send oss dine anleggsdata – vi svarer med en gjennomførbarhetsvurdering.